導入
| X-37 | |
|---|---|
 | |
| 初飛行 | 2010 年 4 月 22 日 |
| 親切 | スペースシャトル 無人 |
| 長さ | 8.38m |
| スパン | 4.57メートル |
| ペイロード | kg |
| 質量 – 打ち上げ時 – 空の | ~5トン ~3.5トン |
| デルタ-V | |
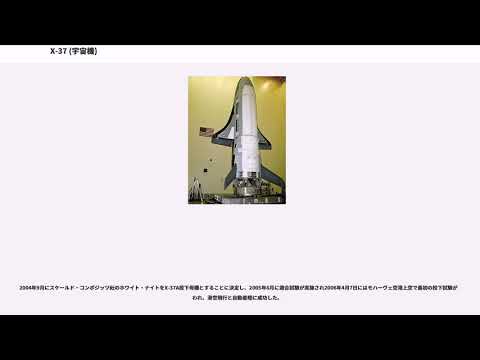
ボーイング・アメリカン。これは重量 6 トン未満の小型宇宙船で、貨物倉を備え、かなりの軌道操縦能力を備えています。
X-37 は完全に自動化されており、X-40A から派生し、サイズが約 120% 増加しました。 2004 年、プロジェクトに割り当てられた予算が廃止された後、X-37 はアメリカの軍事研究機関である DARPA に引き継がれました。 2006 年に財政上の理由から、後者は米国空軍に引き渡され、それ以来開発が続けられました。初の大気圏飛行は2006 年 4 月 7 日にカリフォルニア州エドワーズ空軍基地で行われました。軌道上への最初の打ち上げは、2010 年 4 月 22 日に行われました。X-37 が空軍の任務において果たせる任務は、現在プロジェクトが機密扱いであるため不明です。敵対衛星との戦いに使用できると想定されています。
歴史的
1998 年、NASA は宇宙輸送に役立つ可能性のある新技術を検証するために、無人シャトル飛行実証機の開発を開始しました。研究されている研究分野は、推進剤タンクの設計、熱シールド、アビオニクスおよび構造的側面です。 1998 年 12 月、ボーイング社は、空軍向けに設計した X-40 の設計に基づいて開発を提案した X-37 の開発者に選ばれました。その費用は推定 1 億 7,300 万ドルで分担されました。 NASAとボーイングは50/50。今後4年間で、NASAは拠出額を2400万ドル増額し、米空軍は軍事利用に必要な太陽光パネルと姿勢制御システムの増設資金として1600万ドルを拠出する。
X-37 は、NASA が開発した 3 番目の先進実証機です。 X-33およびX-34を引き継ぎますが、大気圏飛行のみが可能なこれらとは異なり、軌道に打ち上げて大気圏再突入を行うことができます。 X-37 により 41 の新技術を検証できるようになるはずです。この車両は自律性を備えており、270日間軌道上に留まることができます。 X-37 の形状は X-40 の形状を 120% 拡大したものです。 X-40 は、NASA のドライデン飛行研究センターで自動着陸手順をテストするための X-37 プロジェクトの一部としても使用されています。
X-37 の軌道への最初の飛行は当初 2002 年に計画されていました。X-37 は最大翼長を条件とするアメリカのスペースシャトルによって打ち上げられる予定でした。 2002 年 11 月、ボーイングは NASA の宇宙打ち上げ計画の一環として X-37 の開発を継続するための新たな 3 億 100 万ドルの契約を受け取りました。 2 つのプロトタイプを構築する必要があります。
- X-37 進入着陸試験機 (ALTV) は、大気圏内での飛行段階と着陸を検証するために使用されます。空気力学的安定性、構造的完全性、地上からの制御操作をテストします。
- X-37 軌道ビークル (OTV) は、打ち上げ段階、軌道上での運用、大気圏突入および着陸の検証に使用されます。特にアビオニクス、熱シールドの適切な機能、およびその再利用性をテストできるようにする必要があります。 ALTV ビークルの最初のテストは 2004 年に予定されており、軌道飛行は 2006 年に行われる予定です。
2004 年、コンステレーション プログラムの開始により、宇宙機関の優先事項が見直されました。 NASAはオリオン宇宙船の研究に再び焦点を当てている。 2004 年 9 月 13 日、X-37 プロジェクトは先進プロジェクトを担当する国防研究機関である DARPA に移管されました。機密プロジェクトとなります。
